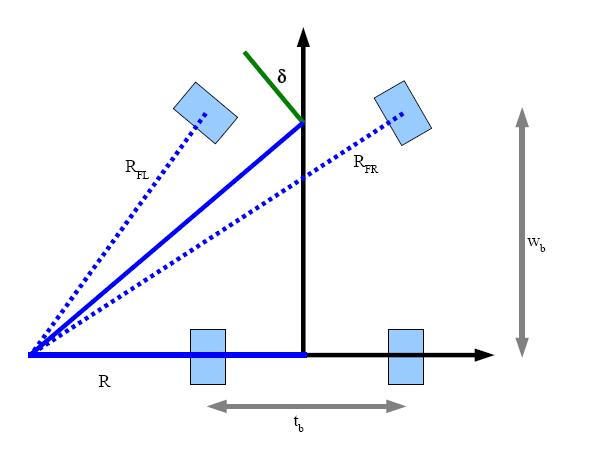
| 4wd Vehicle With Independent Wheel Speed Control (2/18/09) Consider an Ackerman steered vehicle. If we were to control the speed of each wheel (as in a 4-wheel drive electric car with a hub motor for each wheel) then the wheel speeds change as our steer angle increases. This even accounts for large steer angles. Consider making a sharp left turn where our steer angle (δ) is 90 degrees. The rear-left wheel would go backwards. R is the radius from the turning center to the center of the rear axle. This is not always the case even in neutral-steer vehicles with perfect Ackerman steered vehicle – the body would experience some vehicle slip angle. The relationship between radius, steering angle, vehicle rotational rate and vehicle dimensions are shown below:

wb is wheelbase, tb is trackbase. Positive steer angle δ means a left hand turn, positive turning radius R means a left hand turn. We notice that if the steer angle is zero, our turning radius would be infinite, essentially so large we're going straight. As we round a corner at some desired velocity, regardless of the velocity of each wheel, the entire vehicle and thus the radii of from the turning center to each wheel all share the same rotational velocity, ω.
The radii from the turning center to each wheel can be computed as follows:

Going back to basics the relationship between velocity, rotational speed, and turning radius is:
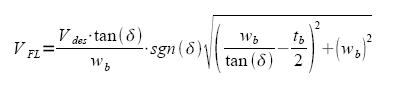
Using the above formula to derive the velocity of each wheel, and substituting the equation for finding R, we start with the front-left wheel:
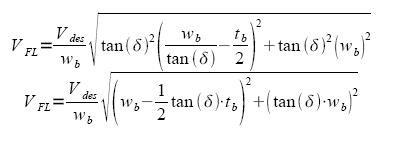
Bringing tan(δ) into the square root, we remove the sgn(δ) function since it "balances" the sign of tan(δ) . We find:
Repeating this for the front-right wheel, we get:

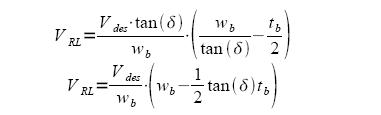
Doing the same for the rear-left wheel:
And repeated for the rear-right wheel:

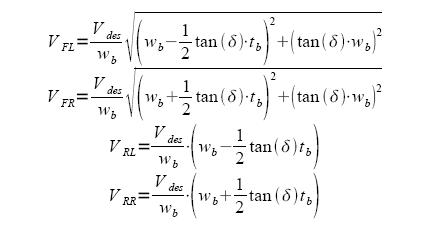
Showing the velocities of all four wheels, with our steering angle δ and Vdes as variable inputs:
|
|
|
|
Copyright 2006-2013 Ramacorp.org | Contact Us | Links | Privacy Policy |